Videos
Collaborative Robots
- Vision-based Robotic Arm Collision Avoidance, January 2025, by Zhiyang Gu and Gary M. Bone
1280 x 720 pixels, 10MB mp4 file:
- Robot learning from demonstration: sorting task.
874 x 718 pixels, 25MB mp4 file:
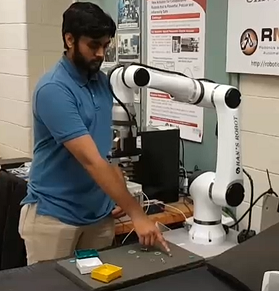
- Collision avoidance using directional proximity control and reaction.
720 x 480 pixels, 6MB mp4 file:

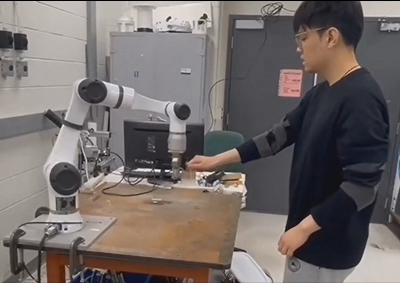
- Robot arm control using natural hand motions.
640 x 360 pixels, 5MB mp4 file:

- We have developed blade control algorithms for maximizing the material removal rate of automated dozers. For preliminary testing, we have created an integrated experimental environment with an instrumented scaled-down robot bulldozer, a vision-based robot localization and steering system, and a laser scanning system for measuring the height profile of the material pile. This video shows one automated dozing pass.
640 x 340 pixels, 5MB avi file:

- Demonstrates our prototype robotic surgical instrument. Unlike cable-based designs, this surgical robot is internally
actuated. This enables increased dexterity for robot-assisted surgery, and the potential for "plug and play" modularity.
640 x 480 pixels, 5.8MB wmv file:

- Summarizes three of our computer vision (AKA machine vision, or robot vision) projects, specifically: rapid automated surface inspection,
vision-guided grasping of objects with unknown 2-D position and orientation, and automated online 3-D modelling and grasping of objects with unknown location and shape.
640 x 480 pixels, 10.3MB wmv file:
320 x 240 pixels, 3.3MB wmv file:
- Demonstrates a machine we developed for a local company which quickly
inspects the bearing surfaces on automotive rocker arms using machine
vision; and then sorts them into reject/accept bins. (1.3 MB AVI
file using DIVX compression, the CODEC is available here
or from www.divx.com):

- Demonstrates the machine vision-guided assembly of four automotive
components. (2 MB AVI file using DIVX compression, the CODEC is available
here or from www.divx.com):

- Clip showing our patented 9 degrees-of-freedom
pneumatic servo gripper. 5.5 MB wmv file:

- Shorter clip showing a 2 degrees-of-freedom servo gripper accurately
locating and holding a part which has been roughly placed on a table.
1.1 MB MPEG file:
- Longer clip showing a 2 degrees-of-freedom servo gripper reconfiguring
and picking up two distinctly shaped automotive body parts. 2.4 MB
MPEG file:

- Dr. Gary M. Bone
- Dept. of Mechanical Engineering
- McMaster University
- Hamilton, Ontario, CANADA, L8S 4L7.
- Phone: (905) 525-9140 ext. 27591
- Fax: (905) 572-7944
- e-mail: gary at mcmaster.ca
Mining Automation: Robot Dozer
Robotic Surgical Instrument Prototype
Computer Vision Research
High-Speed Automated Inspection Machine for Automotive Parts
Vision-Guided Fixtureless Assembly of Automotive Components
Programmable Servo Grippers for Fixtureless Assembly
Dexterous Manipulation Using a Two Fingered Robotic Hand
Demonstation of moving a cylinder by controlled rolling.
2.2 MB MPEG file: 
Demonstation of turning a nut on a bolt. 2.5 MB MPEG file:

Pneumatic Servo Actuator (Position Controlled Pneumatic Cylinder)
Short clip showing the speed and accuracy of one of our
pneumatic servo actuators. 0.2 MB AVI file: 
3D Laser Scanner for Obtaining CAD Models Directly from Objects (AKA Reverse Engineering)
(Shorter clip showing a brief highlight of the scanner in
operation and a still shot of the resulting 3D CAD part model. 1.1 MB
MPEG file)
(Longer clip showing the complete scanning operation and an animation of the 3D CAD part model. 2.2
MB MPEG file)
Special Demo: Our one-of-a-kind Basketball Dunking Robot !!
(Shorter clip. 640 k MPEG file) 
(Longer clip. 1.3 MB MPEG file)