Multiple Degree-of-Freedom Robotic Servo Grippers (Patented)
Description
In
several industries, including automotive, aircraft, camera and photocopier
manufacturing, a large number of complex shaped 3D sheet metal (and sheet
plastic) parts are joined to make frames and bodies. A robotic gripper
suitable for this task has four requirements:
- i) part pickup
-
ii) rigid part locating,
iii) accurate part locating, and
iv) ability to grasp a wide range of shapes.
We
have developed three robotic servo grippers that meet these requirements
and can grasp a wide variety of parts. The grippers feature a novel finger
design that allows them to accurately and rigidly locate the parts in
the presence of initial robot and part positioning errors. Tests have
been performed with gripper prototypes on several automotive parts. The
standard deviation of the parts position was reduced to 0.05 mm after
grasping, from 0.4 mm prior to grasping. For more details please see our
video and
publication pages. For details on the application of these
grippers to automotive assembly please see our fixtureless
assembly page.
-
Examples of parts that can be grasped.
First generation gripper (2 servo controlled axes) holding a part.
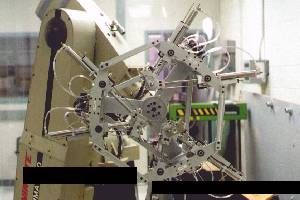
Second generation gripper with a 400 mm workspace and 9 servo controlled axes.
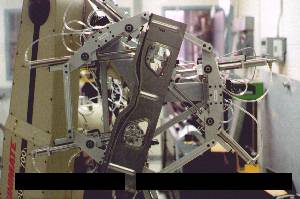
Second generation gripper holding a part.

Third generation gripper with a 200 mm workspace and 4 servo controlled axes.
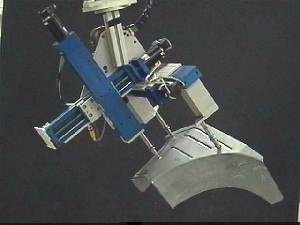
Third generation gripper holding a part.
For Further Information Please Contact:
Dr. Gary M. Bone
Dept. of Mechanical Engineering
McMaster University
Hamilton, Ontario, CANADA, L8S 4L7.
Phone: (905) 525-9140 ext 27591
Fax: (905) 572-7944
e-mail: gary at mcmaster.ca
Researchers
Dr. Gary Bone, William Plut, Robert van Varseveld, Lucian Balan.